Computer Vision — Object Detection, One-Stage vs Two-Stage detectors
- What is Object Detection
- Difference between One-Stage and Two-Stages detectors
- Applications of One-Stage and Two-Stages detectors
What is Object Detection
In Computer vision, object detection simply means identifying and locating objects within an image. Unlike image classification, which assigns a single label to an image, object detection uses machine learning algorithms to detect multiple objects and their respective locations within an image. It typically involves two tasks:
- Object Classification: Identifying what types of objects are present in an image (e.g., cars, people, animals).
- Object Localization: Determining where these objects are located within the image by drawing bounding boxes around them.
Below is the overview of Object Detection’s history

Difference between one-stage and two-stage

After 2014, the object detection generally split into 2 categories: one-stage and two-stage detectors. The main difference between these two is the region proposals, where two-stage detectors do generate region proposals and one-stage detectors do not.
Two-stage detectors
- Stage 1: Region proposals generation, typically using selective search or the Region Proposal Network (RPN).
- Stage 2: Object classification and bounding box refinement on each proposed region.
Two-stage approach allows for high accuracy, as the second stage refines results, but it’s generally slower because of the two-step process. The classic two-stage methods is the R-CNN (Region-based Convolutional Neural Networks) series, including Fast R-CNN and Faster R-CNN.
Below is an example of two-stages detector: R-CNN, which it extract the region proposals from the image first.
One-stage detectors
One-stage detectors process the input image by skipping the proposal generation and directly detecting objects in a single pass through the image. The YOLO (You Only Look Once) and SSD (Single Shot MultiBox Detector) models are prime examples of one-stage detectors.
- Single Stage: Divides the image into a grid and simultaneously predicts bounding boxes and class scores for each region.
One-stage detectors are typically faster and more suitable for real-time applications, but they may sacrifice some accuracy compared to two-stage methods.
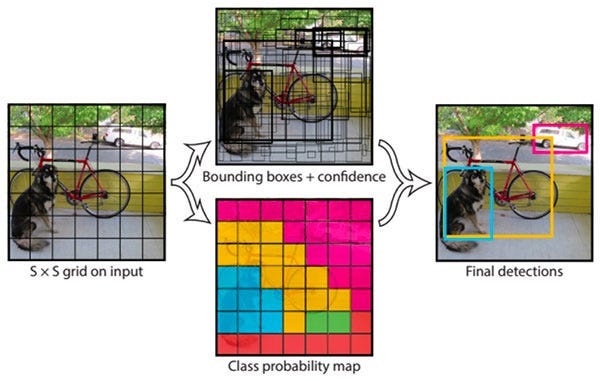
Below is an example of one-stages detector: YOLO, which it divides an image into a grid, predicts bounding boxes with confidence scores, and uses non-maximum suppression (NMS) to finalize object detections.
Application
Two-stage detectors: Known for higher accuracy, especially in complex scenes, due to their ability to refine proposals. Faster R-CNN, for instance, is often preferred in applications where precision is crucial.
- Use case: Medical image analysis, facial recognition, satellite imagery, and other fields where high detection accuracy is essential over speed.
One-stage detectors: Known for their speed, making them ideal for applications where latency is the key factor.
- Use case: Real-time detection like autonomous vehicles and surveillance cameras
Conclusion
Even though two-stage detectors are more accurate due to their structure, advancements in one-stage detectors have significantly narrowed the performance gap. (As of Oct 2024, YOLO v11 just released.)
End of the day, the choice between one-stage and two-stage detectors depends more on specific application needs rather than a clear trade-off in performance.
Reference:
https://www.researchgate.net/publication/353284602_Semantic_Image_Cropping
